SWARM ROBOT Seminar PPT with PDF
SWARM ROBOT Seminar PPT with PDF: Swarm robotics is a step to go near to the collective robotics which is influenced by the self-organized behavior of social animals. With the local interactions and the simple rules, the swarm robotics has the goal to design a huge number of robots with the collection of behaviors like flexible, scalable, and robust. Now, coming to the swarm engineering then it is a discipline which is coming out from a difficult situation or condition and has the goal of defining well-founded methods and systematic procedures for the following things of a swarm robotic system
SWARM ROBOT Seminar PPT with PDF
- Modeling
- Designing
- Realizing
- Verifying
- Validating
- Operating and
- Maintaining
Swarm robotics is defined as novel step to go near to the coordination of a huge number of robots. The important characteristics of a swarm robotic system are mentioned below:
- The robots have the autonomous characteristic
- The robots are present in the environment and can act to make better changes in it
- The sensing capability and communication capability are local in the robots
- They do not have the possibility or means of entering to global knowledge or to the centralized control
- The robots have parameter of cooperation to tackle a particular task
Methods availed to analyze or design swarm robotics:
The methods used to design the swarm robotics are below:
- Behavior-based design methods
- Automatic design methods
The methods used to analyze the swarm robotics are below:
- Microscopic models
- Macroscopic models
- Real – robot analysis
The diagrammatic representation of the methods is drawn below:
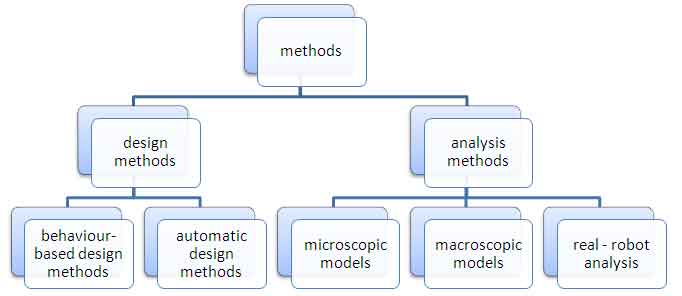
Fig1: methods to design and analyze swarm robotics
Design methods
- Behavior-based design methods: The common way to develop a system of swarm robotics is the behavior-based design. The literature on behavior – based design techniques are divided into three important categories and they are:
- Virtual physics-based design
- Probabilistic finite state machine design
- Other behavior-based design methods
- Automatic design methods: The avail of automatic design methods permits the automatic production of behaviors without the clear and obvious intervention of the developer. Automatic design techniques for the systems of swarm robotics can be separated into two important sub-domains and they are:
- Reinforcement learning
- evolutionary robotics
Analysis methods
The essential phase in an engineering process is the analysis phase.
- Microscopic models: Microscopic levels take each individual robot and analyze the interactions of robot-to-environment and robot-to-robot. In the field of swarm robotics, a number of models have been developed with distinct levels of abstraction. They are as follows:
- The robots are considered as point-masses in the simplest models
- The models which have the difficulty at an intermediate level view 2D worlds with kinematic physics
- The models with high level of complexity view 3D worlds with dynamic physics
- Macroscopic models: The systems of swarm robotics are viewed as a whole in the macroscopic models. The individual parts of a swarm robotics system are not included in an account in favor of an explanation of the system at a high level. The works in the microscopic models are classified into three categories and they are:
- Rate and differential equations
- Classical control and stability theory
- Other modeling approaches
- Real-robot analysis: The avail of real robots for the validation of a collective behavior is a basic tool. The analysis of real-robot is very away from the scenarios where the systems of swarm robotics are supposed to work or operate.
Collective behaviors:
The important collective behaviors are explained in it.
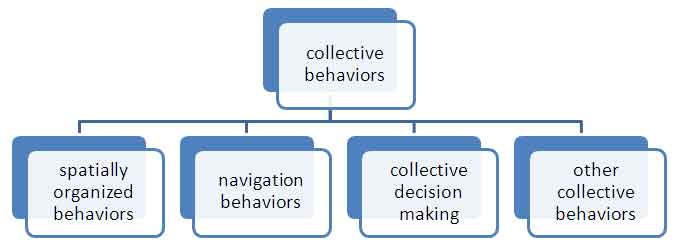
Fig2: hierarchy of collective behaviors
The spatially organized behaviors are categorized into the following:
- Aggregation
- Pattern formation
- Chain formation
- Self-assembly and morphogenesis
- Object clustering and assembling
The navigation behaviors are categorized into the following:
- Collective exploration
- Coordinated motion
- Collective transport
The collective decision making is categorized into the following:
- Consensus achievement
- Task allocation
The other collective behaviors include the following:
- Collective fault detection
- Group size regulation
- Human-swarm interaction
Limitations and future direction of swarm robotics
The reasons for the absence of swarm robotics are in a wide range of the limitations in the hardware for the present robots. But in the future, there will be a wide range of applications to gear the real-world applications. The enhancement in the use of swarm robotics enhances the swarm engineering too and there will be a requirement for the following techniques:
- Requirement modeling and specification
- Design and realization
- Verification and validation
- Operation and maintenance
Here we are giving you Swarm Robot Seminar and PPT with PDF report. All you need to do is just click on the download link and get it.
Swarm Robot PPT and Seminar Free Download
Swarm Robot pdf Report Free Download
It was all about Swarm Robot Seminar and PPT with pdf report. If you liked it then please share it or if you want to ask anything then please hit comment button.
Leave a Reply